概念試作(2)

Fig 2.1 概念試作モデルによるポーズ一例
概念試作の段階で持ち得ている可動範囲および付随する問題に関して、
以下に述べる。

Fig 2.2 腕部懸垂部構造
腕部の可動範囲について。
(Fig2.2)は概念試作の側面である。
腕部の懸架方法について、ご確認いただきたい。
腕部は、人間の肩と同様に、背面から肩甲骨に相当する骨格を介して胴体側面に懸架される。
ただし、人間でいうところの鎖骨となる構造は、現状、存在していない。
独自の特徴としては、上腕が人間よりも一節多く存在する事と、
上腕と肩甲骨の間に、一節、関節が設けられている事である。
モデルにてオレンジの直方体で構成される部位である。
これらの構造は、従来のデザインに見られる問題点である、腕部の長さ不足を
補う為のものである。
腕部の役割は幾つか考えられるが、ここでは物を掴む手の位置の移動とする。
手の位置の移動という観点では、従来のデザインは、ほとんど体側面に沿って
移動させるのみに留まっている。
では、どの程度移動させる事が出来れば良いのか、という事だが、
ここでは、ひとまず劇中の動作のある程度の再現、とする。

Fig 2.3 腕部可動範囲(1)
腕部の移動とその先端の手の移動をご覧頂きたい。
増加させた関節は、肩甲骨と上腕の間に、腕部を延長させる形で存在している事がわかる。
尚、当記事では、これらの増加させた腕部関節の呼称として、肩甲骨の先から順に、
前肩、上腕、中腕、下腕、と呼称する事とする。

Fig 2.4 腕部可動範囲(2)
Fig 2.4は、上腕部をそのままに、中腕を前方へ持ち上げた状態である。
デザイン的には、腕部全体を上げた状態となる。

Fig 2.5 腕部可動範囲(3)
Fig 2.5は、上腕部を含めた腕部全体を水平に持ち上げた状態である。
胴体の厚みよりもさらに前に手首が位置していることがわかる。
腕部全体が上がった状態で、更にそのまま前方へ突き出した状態である。
また、前肩部の位置をご確認いただきたい。
基本的に胴体に対して水平位置を保ち、その先につながる腕部の回転軸位置を
背面側の肩甲骨基部よりも胴体の中心側へと移動させている。
ただし、この構造には、前肩部には常に片持ちの力が掛かり続けるという問題がある。
前肩部と上腕部が長いほど腕は前方に振り出せることになるが、
構造的な負荷に留意する必要がある。

Fig 2.6 腕部可動範囲(4)
Fig 2.6、更に、肩甲骨を前方に押し出し、腕部全体を最大限に突き出した状態。
中腕のほぼ全てまでが胴体よりも前方に位置していることをご確認いただきたい。
ここまでの動作によって、手を胴体の前面にて自由度を確保させる事が出来る。
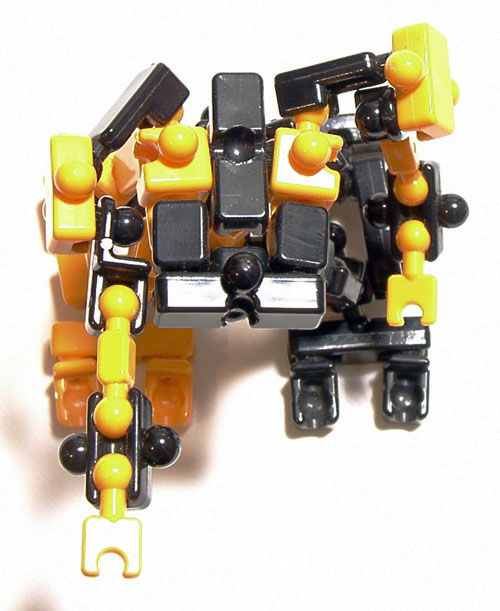
Fig 2.7 腕部可動範囲(5)

Fig 2.8 腕部可動範囲(6)
Fig 2.7 Fig 2.8は、Fig 2.6を上面から見た図である。
頭部は腕の動作を見せるために外している。
この位置まで腕を突き出すことで、
手が胴体の前面へ大きく移動できる事が確認できる。
ここまでに用いた可動を適宜応用することで、
必要な動作を行う、とする。
例えば、上腕は垂直に上方へ回転させることが可能であり、
肩甲骨の動作を組み合わせ、頭頂へ手を届かせる事も可能である。
逆に、不必要な可動範囲を制限する構造が必要となる。
この概念試作モデルでは、全ての関節がボールジョイント(以下BJ)で構成されているため、
デザイン的に不要な方向にも動いてしまう。
また、この概念試作の腕部はかなり細身になっているが、
デザイン的なボリュームの調整と、それに伴う可動範囲への影響を
検討しなければならない。