概念試作(3)

Fig 2.9 概念試作モデルによるポーズ一例(2)
引き続き、概念試作モデルを用いて可動範囲と問題点の解説を行いたい。

Fig 2.10 概念試作モデル脚部
Fig 2.10は、概念試作モデルの脚部の拡大図である。
今回、構想している可動構造においては、頚部~脚部が前後2重となった骨格が採用されている。
この構造は、SDガンダムのプロポーションと要求性能の両立を図るために考案したものである。
前後方向の厚みが大きいSDガンダムにおいて、大きな可動域を確保する為には、可動軸の位置をなるべく外側に配置する必要がある。
しかし、重心から大きく外れた位置に設けられた可動軸では、重心を安定させる事が困難である。
また、上下方向の高さに対して、前後方向の厚みが過大であり、十分な可動範囲を確保しうる小径の可動軸では、可動節の周囲のみ、不自然にくびれた形状になりがちであり、またトルクも確保しづらい。
そこで、可動軸および節を2組用意し、重心を挟んで設置する事で、上記の要求に対してある程度の両立を可能としている。
小径の可動軸を複数並列に用いる事で、トルクを確保し、シルエット的にもくびれを緩和している。
この構造の動作、また長所、短所について、順次述べたい。

Fig 2.11 脚部可動範囲(1)
Fig 2.11は、脚を前方へ振り上げた状態である。
構造としては、腿・膝・足首・つま先、の4ヶ所の可動軸を有し4つの節からなる脚が、前後に存在している。
便宜上、前方のものには『前』、後方のものには『後』を付けて呼称する。
(例:前大腿部 後下脚部 前膝、等)
この関節配置の根拠であるが、劇中においては、脚に関する有効な解釈を得られる描写が見られないため、2脚の効率的な運用を果たしている、という点で人体の構造を参考としている。
短所として、2重の骨格の前後が干渉し、人間に比して単純な可動範囲においては劣っている、という点が挙げられる。
前後の骨格の配置や、節の形状の検討により、干渉を減らす工夫が必要と思われる。

Fig 2.12 脚部可動範囲(2)
Fig 2.12は、Fig 2.11の状態から、前脚の膝のみを曲げた状態である。
これも注意すべき点であるが、前後の骨格の角度の差により、末端の節、この場合、足首の角度が影響を受け、人間のように、膝と足首の曲げ角度を個別に調整するような事は出来ない。
逆に言うなら、二つの膝の角度に連動して足首の角度が変化する。

Fig 2.13 脚部可動範囲(3)

Fig 2.14 脚部可動範囲(4)
Fig 2.13およびFig 2.14は、前後膝を曲げ、足裏を水平を保ったまま持ち上げた状態である。
Fig 2.14の状態では、後脚を前脚の外側に開いて干渉を避け、重なった状態にまで曲げている。
SDガンダム体型においては、足裏の大きさが人間に比して極端に大きく、またその大きさほどには、腿と膝の運動による脚全体の上下動は大きくない。
そのため、歩行に関しては、常に”すり足”的な動作になると予想される。
そういった意味では、この足裏が水平の状態を主とした可動域を持つ関節系は、自由度という点では短所だが、見た目上の説得力を見出す事も可能であると思われる。
腰部から頸部までの部位に関しては、人体とはかなり異なった構造及び動作を有する。
人体における腰部の動作、特に前後方向への屈伸動作を、単に上半身部位の角度変更とするだけでなく、頭部を含む上体を移動させ、重心の位置を制御するためと考えるならば、SDガンダム体型におけるそれを検討する際に忘れてはならないのが、頭部の大きさであろう。
SDガンダムの頭部における全身に対する重量的な割合は非常に大きいと思われ、単に体積で比較するならば、胴体以上に大きな部位である。逆に、上半身の比率は人間より小さく、ほとんど両腕部の基部が占めているように思われる。
つまり、SDガンダム体型における腰部の動作は、ほとんど頭部の動作に直結しており、これらを区分するべきではないと考えられる。
重心を移動させる、という意味において、再び脚部と同様、上下方向の薄さと前後方向の厚さという問題に見舞われる。
人体ならば、腰部を屈曲させることにより、末端に位置する頭部は大きく移動し、効果的に重心を移動させることができるが、SDガンダム体型では、上下方向の薄さによって、腰部の屈曲による上半身の移動は小さなものとなってしまっており、また前後の厚みから、屈曲させ得る角度自体も限られてしまうため、大きな頭部を十分に移動させる事が難しい。
そこで、腰部にも脚部同様に前後2重の骨格を採用した。
これにより、関節軸一つあたりを小径化して動作角度を確保し、そして、下半身に対して上半身は水平に移動する。
重心の移動、という意味においては、上体を屈曲させるよりも効果は大きく、前後の厚み方向に水平に動作するため、動作範囲の確保も容易である。
以下、Fig 2.15及びFig 2.16に概念試作モデルにおける、腰部の前後動を示す。

Fig 2.15 腰部後退

Fig 2.16 腰部前進
また、前述の上半身の角度変更に関しては、2重骨格の採用により腰部には前後動の機能は存在していないが、胸部の中央に回転軸を設け対応している。
以下、Fig 2.17及びFig 2.18に胸部の前後屈を示す。

Fig 2.17 胸部後屈

Fig 2.18 胸部前屈
ただし、概念試作の状態からも読み取れるが、腰部を動作させない状態で胸部のみを屈曲させても、胸部と腰部の干渉から大きな動作は期待できない。
前後屈の軸を胸部に設け、腰部の前後動と併用する事により大きな動作範囲を確保している。

Fig 2.19 上半身前屈動作

Fig 2.20 上半身前屈動作

Fig 2.21 上半身回転動作
尚、2重骨格を捻ることで回転動作としている。
これは、脚部に関しても同様である。
故に、2重骨格の採用部位においては、捻る事を念頭に入れた配置やクリアランスをデザインに盛り込まなくてはならない。
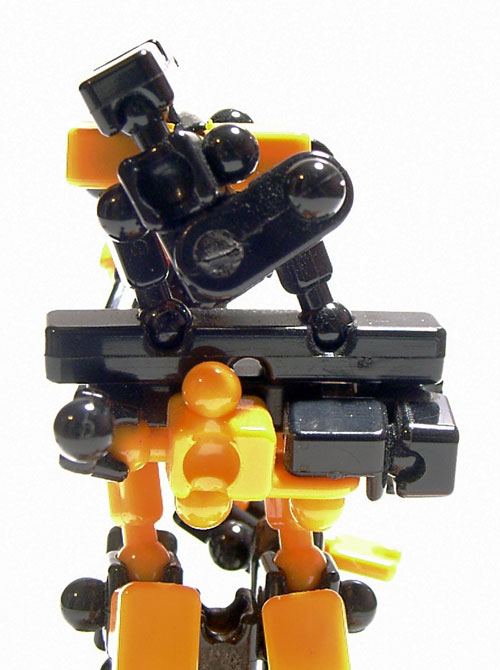
Fig 2.22 頭部後退
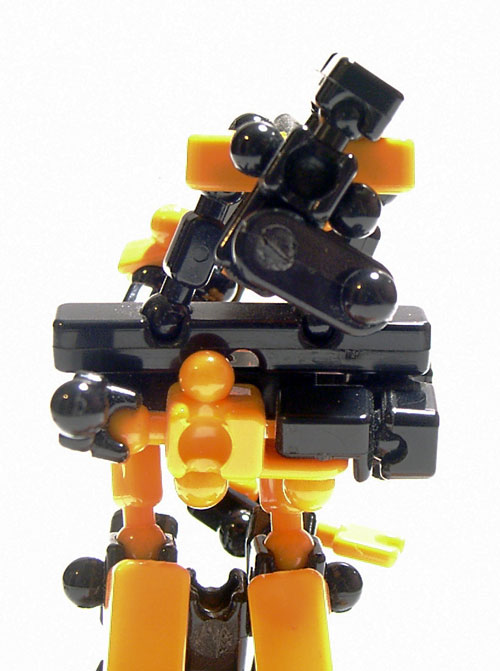
Fig 2.23 頭部前進

Fig 2.24 頭部回転
頚部にも、腰部と同様、2重骨格と回転軸からなる関節構造が採用されている。
Fig 2.22、Fig 2.23、Fig 2.24は、頭部の動作を示す。
重心を大きく移動させる事が可能であり、また、頭部、特に顔面部分の角度変更において、胸部と頭部の干渉を避けて大きく角度を変える事にも有効である。

Fig 2.25 横方向重心移動
これら2重骨格構造は、左右方向には干渉の無い限り制限無く動作出来、Fig 2.25のように重心を移動させる事が出来る。
ただし、Fig 2.25からも読み取れる通り、2重骨格部の太さが概ね左右方向の動作の自由度を決定付けると言えるが、この部位が細すぎる事は、デザインにおける影響が懸念される。
動作範囲とデザインのバランスを検討する必要がある。
前章、”概念試作(2)”においては割愛したが、肩甲部は、この左右方向の動作によって頭部を逃がす事により、大きく上へ動作させる事も可能である。
機能として頚部から脚部まで2重骨格を採用したが、一貫した構造を採用する事によって、デザインとしての説得力を増す効果も考慮している。
本来ならば、腕部にも採用すれば、一貫性という点において完成度は増すと思われるが、腕部に関しては、優先して採用された前方向への伸長機能が2重骨格を必要としていなかった。
既に述べたとおり、上記及び、”概念試作(1)””概念試作(2)”にて解説した構造は、SDガンダム体型の上下方向の高さ、前後方向の厚み手を加える事無く、動作範囲を与える事に成功していると思われる。
これにより、逆説的に、SDガンダム体型そのものに、意味性を与え、総体として矛盾の無いデザインとして成立させる事が出来ると思われる。